Inside the Factory Where Humanoids Build Humanoids
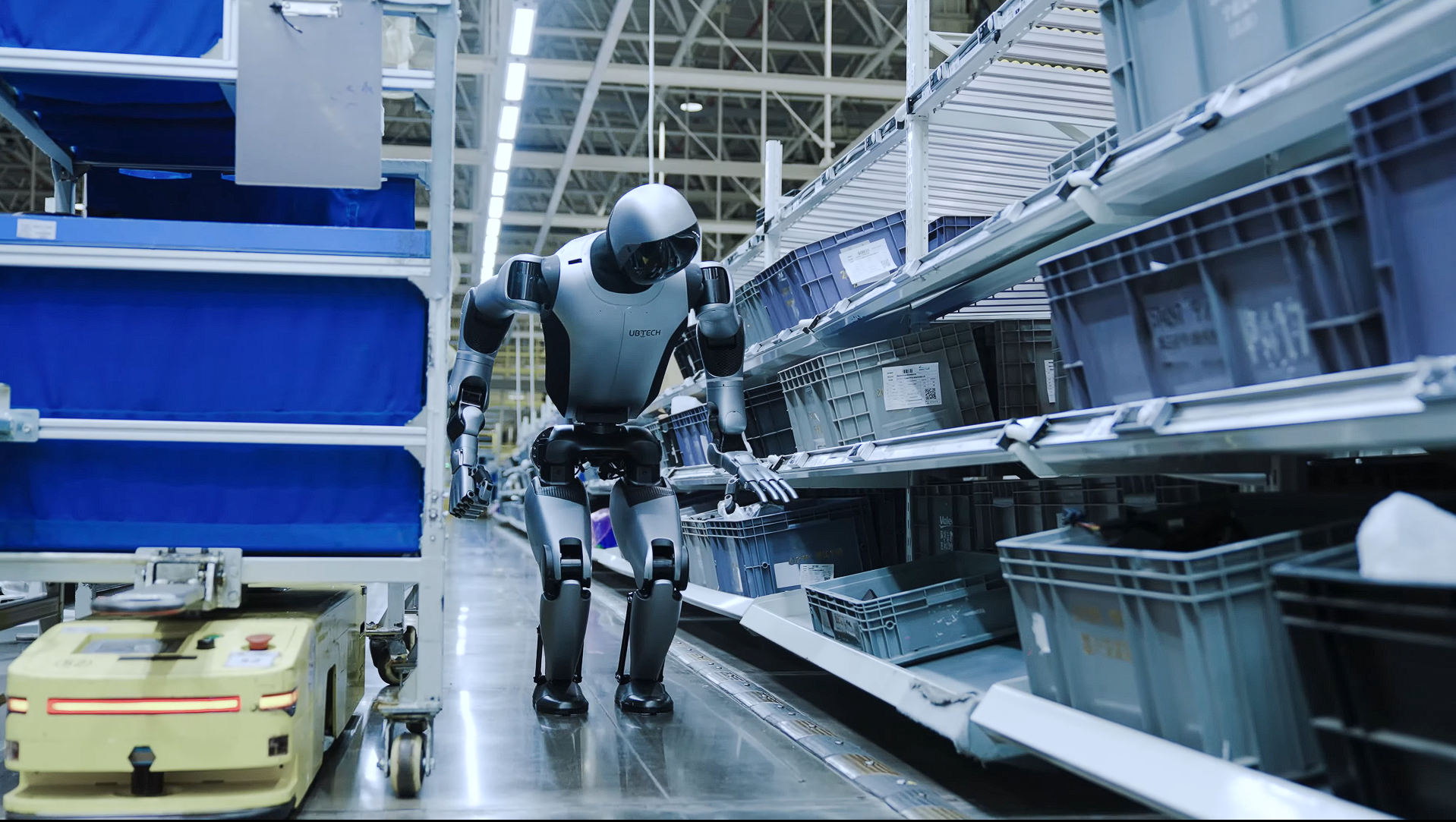
This video from Tiff In Tech offers a rare deep dive into the 1X factory in Hayward, California, providing a look at the manufacturing philosophy behind Neo. While most humanoid reveals focus on flashy movements, this tour highlights the vertical integration and engineering constraints that make a consumer-grade robot viable.
The "Anti-Supply Chain" Strategy
One of the most striking takeaways is 1X’s decision to build every motor, battery pack, and metal part in-house. Bernt Børnich notes that because a specialized supply chain for humanoids doesn't exist yet, they had to move away from traditional industrial robot components. This vertical integration isn't just about control; it's about iteration speed. By machining their own parts, they can identify a failure point today and have a redesigned version on the floor tomorrow, rather than waiting weeks for a supplier.
Mechanical Safety vs. Software Safety
The engineering team makes a compelling argument for safety through "compliance." Unlike traditional robots that use rigid gear drives, Neo uses a tendon-driven system.
Back-drivability: Because there are no gears, the robot's limbs can be moved easily by human touch (back-driven). If Neo's hand hits something, the motor can spin without forcing the limb through the object.
Mass Reduction: Neo weighs only 30kg. By using soft goods and lightweight materials (inspired by sports research like the NFL), they minimize the kinetic energy involved in any potential collision.
The Feedback Loop
The factory floor is organized so that engineers are physically located right next to the assembly and testing areas.
Stress Testing: The factory includes a room where joints are cycled hundreds of thousands of times until they break. This "run to failure" mentality allows them to refine the reliability needed for a robot intended to live in a home environment.
Training and Learning: The video highlights that a safe robot can learn faster. If a robot is "caged" for safety, it cannot interact with the real world, which limits the data it can collect. By making Neo mechanically safe, 1X can let it learn in unconstrained environments.
The 10-Year Vision
Børnich discusses the concept of a "hard takeoff" where robots eventually build the infrastructure—data centers, energy grids, and chip fabs—required to sustain them. He describes a self-sufficient loop from "atom to intelligence," shifting the perspective of humanoids from simple tools to a new category of companion, which he likens to Calvin and Hobbes.
Potential Intro/Closing Comment:
"What stands out here is the move away from the 'Black Box' approach. By front-loading the complexity into the machining and keeping everything under one roof, 1X is attempting to solve the scalability problem that has historically plagued high-end robotics. It's not just about building a robot; it's about building the machine that builds the robot in under a month."